ORB-SLAM2局部映射线程处理从跟踪线程传来的新的关键帧,进行local BA来优化相机位姿和局部地图点。同时搜索和当前关键帧共视的其他关键帧,寻找新的ORB特征匹配对,通过三角测量得到更多的地图点。根据跟踪线程提供的地图点信息,局部映射线程会严格剔除不合格的地图点,只保留高质量地图点。同时冗余的关键帧也会被剔除。局部映射线程流程如下图红线框内所示:
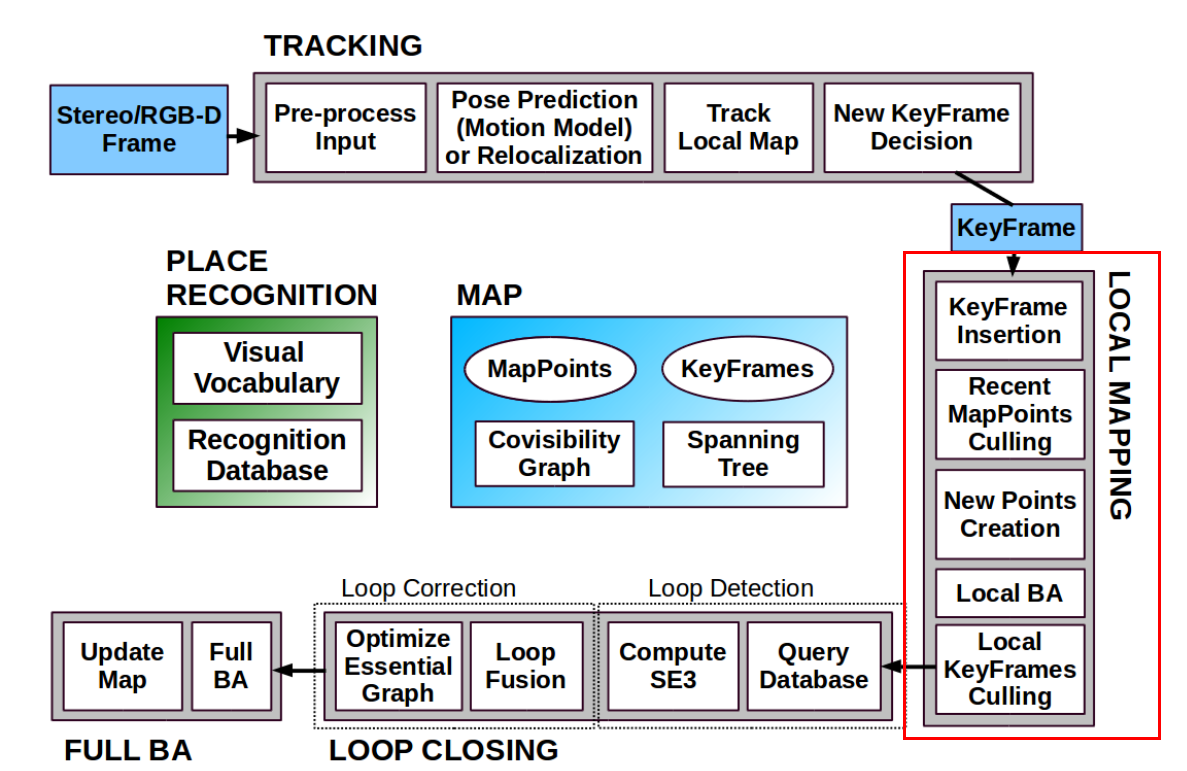
主要包括:
- 插入关键帧;
- 剔除新插入的地图点;
- 新建地图点;
- Local BA;
- 剔除关键帧。
与跟踪线程的联系
局部映射线程和跟踪线程主要通过关键帧联系。跟踪线程对每一帧图像进行估计和优化,得到相机位姿,之后判断这帧图像是否可以当做关键帧:
// Tracking.cc
// Check if we need to insert a new keyframe
if(NeedNewKeyFrame())
CreateNewKeyFrame();判断条件在NeedNewKeyFrame()中体现为(New KeyFrame Decision):
- 局部映射线程没有被回环检测线程停止;
- 距离上一次重定位超过1s,或者关键帧数量小于帧率;
- 局部映射线程是否空闲,即是否处于可以进行插入关键帧操作状态,或者距离插入关键帧已经过了1s;
- 当前帧跟踪到的点数大于15,且跟踪到的点与之前参考的关键帧重复度不能过高(不超过参考关键帧的90%);
只有上述条件都符合,才能将当前帧作为关键帧插入到地图中。如果插入时局部映射线程正忙,此时向其发送停止BA的信号,使得局部映射线程尽快处理新到的关键帧。
CreateNewKeyFrame()将当前帧包装为关键帧,之后传入局部映射线程,插入到地图中。
mpLocalMapper->InsertKeyFrame(pKF);
mpLocalMapper->SetNotStop(false);插入关键帧
插入关键帧在函数ProcessNewKeyFrame()中实现。跟踪线程将待插入的关键帧缓存到一个列表中。插入关键帧操作流程如下:
-
每次从列表中pop出一个关键帧
mpCurrentKeyFrame,然后计算该关键帧的BoW; -
将地图点与
mpCurrentKeyFrame进行数据关联。在此前TrackLocalMap函数中,已经将这个关键帧与地图点进行了匹配,但是没有将地图点绑定到这个关键帧上。数据关联过程如下:// pMP是一个地图点指针 // 添加地图点对当前关键帧的观测 pMP->AddObservation(mpCurrentKeyFrame, i); // 更新地图点的平均观测方向和深度 pMP->UpdateNormalAndDepth(); // 由于观测到该点的关键帧+1,所以更新该点的最佳描述子 pMP->ComputeDistinctiveDescriptors(); -
更新关键帧之间的连接。
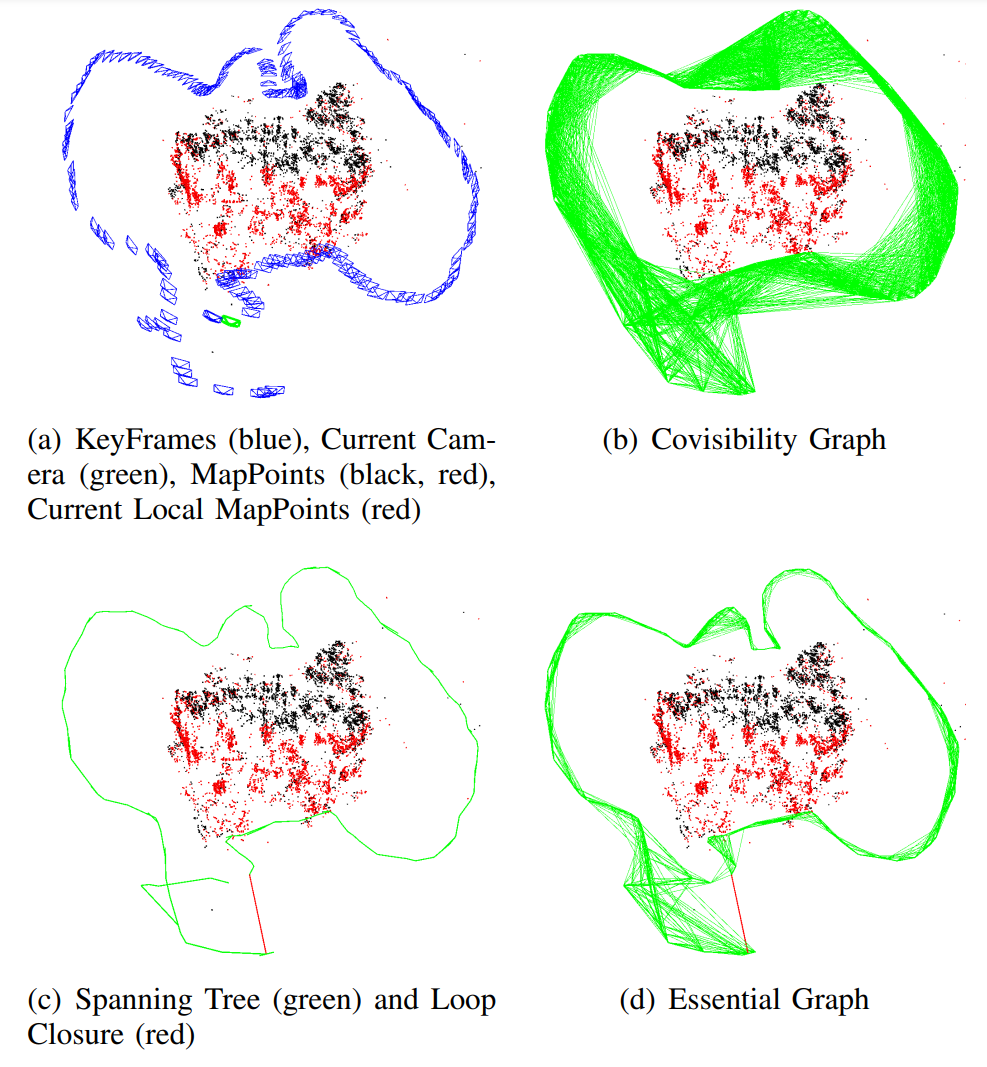
这里需要强调一下ORB-SLAM2中关键帧之间的连接是通过共视图(Covisibility Graph)和生成树(Spanning Tree)表达的。
共视图: 是一个有权重的无向图,图的结点为一个关键帧,如果两个关键帧能共同观测到一定数量的地图点,那么这两个关键帧之间建立一条边,边的权重为共同观测到的地图数量。
生成树: 生成树是共视图的包含最少边的子图,每次向生成树添加一个关键帧时,将该关键帧与树中共视地图点数量最多的关键帧连接。从生成树中删除一个关键帧时,也要更新受到影响的所有关键帧的连接关系。
如下图所示,分别是共视图和生成树(绿色部分)。
更新
mpCurrentKeyFrame与其他关键帧的连接关系,也就是更新共视图和生成树:// Update links in the Covisibility Graph mpCurrentKeyFrame->UpdateConnections();UpdateConnections()函数流程如下:(1)获得
mpCurrentKeyFrame观测到的所有地图点;(2)遍历地图点,得到所有和
mpCurrentKeyFrame有共视地图点的关键帧,并统计这些关键帧的权重,即共视地图点数目;(3)如果共视地图点数目大于15,那么将连接
mpCurrentKeyFrame和这个关键帧;如果所有关键帧与mpCurrentKeyFrame的共视地图点数目都不大于15,则选取共视地图点数最多的关键帧与mpCurrentKeyFrame建立连接;(4)将和
mpCurrentKeyFrame共视的关键帧按照权重进行排序,完成共视图的更新;(5)更新生成树,将权重最高的关键帧作为
mpCurrentKeyFrame的初始父关键帧:mpParent = mvpOrderedConnectedKeyFrames.front(); mpParent->AddChild(this); mbFirstConnection = false; -
将
mpCurrentKeyFrame插入到地图中:// Insert Keyframe in Map mpMap->AddKeyFrame(mpCurrentKeyFrame);
剔除新插入的地图点
剔除新插入的地图点在函数MapPointCulling()中实现。处理上一关键帧会插入新的地图点,在这里需要对这些新加入的地图点进行筛选,剔除质量不好的点。
筛选条件为:
- 跟踪到该地图点的帧数目
mnFound小于预计能观测到该地图点的帧数目mnVisible的25%,那么剔除这个地图点(MapPoint::SetBadFlag()函数实现)。这里解释一下,visible表示这个地图点在某一帧的视野内,通过Frame::isInFrustum()函数判断。虽然这个地图点能被这帧观测到,但是不一定能和这一帧上的特征点匹配上。如果匹配上,就是found了。 - 从该地图点创建开始,到这一个关键帧已经过了不少于2个关键帧,但是能观测到这个地图点的关键帧数目小于等于2,那么剔除这个地图点;
如果该地图点从创建开始,已经经过连续三个关键帧的检测而没有被剔除,那么说明这个地图点质量很高,之后不再对其进行检测。
新建地图点
新建地图点在函数CreateNewMapPoints()实现。
首先获得与当前关键帧mpCurrentKeyFrame共视权重最高的前20帧关键帧vpNeighKFs;
// Retrieve neighbor keyframes in covisibility graph
int nn = 10;
if(mbMonocular)
nn=20;
const vector<KeyFrame*> vpNeighKFs = mpCurrentKeyFrame->GetBestCovisibilityKeyFrames(nn);然后遍历vpNeighKFs,对每个邻近关键帧pKF2 ,进行如下步骤:
-
计算
pKF2到当前关键帧mpCurrentKeyFrame的位移与pKF2中地图点深度中值的比例,如果比例小于0.01,则跳过,不新建地图点; -
根据
mpCurrentKeyFrame和pKF2的位姿,计算基础矩阵: -
在
mpCurrentKeyFrame和pKF2中没有经过匹配的特征点进行特征点匹配,用到的方法为:matcher.SearchForTriangulation(mpCurrentKeyFrame,pKF2,F12,vMatchedIndices,false);这里先通过BoW缩小匹配范围,只对同一个node节点的特征点进行匹配。匹配是检测特征点对是否满足对极几何约束,然后选择描述子距离最小的作为匹配点对。这样可以缩小匹配范围,加快匹配速率。
-
根据上一步得到的匹配点对,三角测量生成对应的3D地图点。对每个3D地图点,进行:
- 视差角度检测,3D地图点到两帧相机中心向量夹角余弦值不小于0.9998;
- 正深度检测,3D地图点深度大于0,需要在相机前方;
- 重投影误差在两帧相机的重投影误差不大于阈值;
- 尺寸连续性检测。
-
如果新生成的3D地图点经过步骤4检测,那么三角测量生成3D地图点成功,将3D地图点与
pKF2到当前关键帧mpCurrentKeyFrame进行数据关联。
这些新生成的3D地图点之后会在剔除新插入的地图点步骤进行进一步筛选。
对于当前关键帧mpCurrentKeyFrame,其对应关联的3D地图点是由两个关键帧建立的,但是其也有可能在其他关键帧中存在匹配关系。比如某3D地图点mp1是由mpCurrentKeyFrame和pKF2的某个匹配对(idxCurrent, idx2)三角测量得到,但是pKF2和pKF1存在匹配对(idx2, idx1),也由此生成3D地图点mp2,那么此时(idxCurrent,idx1)也可能是匹配的,此时就要融合mp1和mp2。这个步骤在函数SearchInNeighbors()中实现,大致思路为:
-
将当前关键帧的3D地图点投影到相邻(一级相邻和二级相邻)关键帧中,若相邻关键帧中有对应的匹配特征点,检查该特征点是否已经有了对应的3D地图点:
- 如果有,将这两个3D地图点融合(选择观测数最多的)
- 如果没有,为该特征点添加该3D地图点;
匹配过程在
matcher.Fuse(pKFi,vpMapPointMatches);实现。 -
将所有相邻关键帧的3D地图点放入集合
vpFuseCandidates,投影到当前关键帧中进行匹配融合:matcher.Fuse(mpCurrentKeyFrame,vpFuseCandidates)。 -
更新当前关键帧地图点的描述子,深度和观测方向等;
-
更新当前关键帧与其他关键帧的连接关系。
Local BA
局部BA对当前关键帧位姿,当前关键帧一级相连的关键帧位姿,以及这些关键帧观测到的地图点进行集束优化。参与优化的还有不属于上述关键帧,但是能观测到这些地图点的关键帧,这些关键帧的位姿在优化时不变。在优化过程中,会剔除观测外点。
在跟踪线程中只进行了motion-only BA,只对相机位姿进行了优化,这里Local BA对位姿和地图点进行了优化,保证了SLAM的实时性和准确性。
剔除关键帧
由于在跟踪线程插入的关键帧条件比较松,因此还需要进一步剔除关键帧,来保证之后进行优化时不至于复杂度过大,同时也减小了随着运行时间过程,所需存储空间过大。
剔除条件:如果某个关键帧90%的地图点能被至少3个其他关键帧观测到,那么这个关键帧时冗余的:
if(nRedundantObservations>0.9*nMPs)
pKF->SetBadFlag();最后,会将当前关键帧送入闭环检测队列中。