背景
我们站在现在的时间点看,可以喊出这句话:机器人以及自动驾驶的发展都离不开激光雷达。尽管在L2/L3智能驾驶领域还存在纯视觉vs激光雷达技术路线之争,但是在机器人及L4自动驾驶领域,激光雷达已经是一个不可或缺的核心传感器。相较于视觉,激光雷达作为传感器本身,对于环境变化的鲁棒性以及测量数据的精准度都更好,从而降低了算法开发的难度,增加了易用性。如下图所示,分别是AutoX RoboTaxi和未来机器人无人叉车,均使用了多线激光雷达。


多线激光雷达种类较多,按照旋转机构,可分为机械式(如速腾、禾赛、Ouster、Velodyne等品牌的多线雷达)、半固态(Livox多线雷达)、以及纯固态激光雷达(基本用于感知避障)。其中机械式以及半固态多线激光雷达因视场角大,天然适合用于定位导航。
激光里程计是激光雷达定位导航里的核心部分,其通过扫描帧配准,推算出两帧雷达点云之间的相对位姿,完成航迹推算的功能。目前实现该功能最基础的ICP (Iterative Closest Point)配准算法在1992年就被提出BeslAndMcKay1992。ICP算法目前在主流的3D点云处理库都已被实现,如Open3D ICP和PCL ICP。目前这类方法都存在鲁棒性的问题,可能没法开箱即用,需要根据传感器参数、应用环境等进行调优。
因此,今天来研读一篇发在RAL的论文”KISS-ICP”,号称针对大部分场景,无需调参,开箱即用。
Vizzo I, Guadagnino T, Mersch B, et al. Kiss-icp: In defense of point-to-point icp–simple, accurate, and robust registration if done the right way[J]. IEEE Robotics and Automation Letters, 2023, 8(2): 1029-1036.
其同步公开了源码Github kiss-icp,star数已达到1.2k,看来确实够好用。
整体框架
问题定义:给定3D激光雷达扫描帧,即表达在激光雷达坐标系的点云,目标是计算此扫描帧时刻对应的激光雷达全局位姿。
KISS-ICP取名意思是keep It Small and Simple,也就是尽可能让算法流程简易化,其实就是动态参数化的ICP方法。整体流程分为四步:
- 去运动畸变。对运动过程中的扫描点云去畸变;
- 降采样。降低计算量的重要步骤。
- 估计对应点。基于动态阈值方法,关联输入点云与局部地图点云,找到点之间的对应关系;
- 点云配准。基于更加鲁棒的ICP优化方法计算相对位姿,并将输入点云融合到局部地图中。
去运动畸变
对于实际应用,激光雷达在扫描过程中,载体也在运动。激光雷达采集一帧数据过程中,采集第一个点的时刻与最后一个点的时刻,激光雷达传感器自身坐标系已经发生了变化。激光雷达采集一帧数据时间这个可以类比卷帘相机曝光时间。因此,需要对点云去运动畸变。如果直接将激光雷达输出的点云送到算法进行处理,会影响到定位精准度。
主流去畸变方法是基于恒速模型、基于轮式编码器和基于IMU三类方法。基于恒速模型是最简单的方案,其不需要额外传感器,也不需要复杂的多传感器时空同步标定等。KISS-ICP采用恒速模型,其认为激光雷达采集速率已经很高,且机器人应用速度比较低,加减速带来的影响很小。
令时刻的位姿为 ,旋转矩阵,平移向量。已知时刻和时刻的位姿,则到的相对位姿为:
则时刻对应的速度、角速度可由恒速假设计算为:
其中是两时刻差, 运算将映射为Axis-angle表示,详细计算可参考3D旋转变换。
雷达一帧的扫描时间为,对于点云中每个点,其采样时刻相对于一帧第一个点的相对时间记为。基于相对时间和计算出的恒定速度,可以对点云去畸变。去畸变后的点云记为,去畸变后的点通过坐标变换,计算为:
其中 运算将Axis-angle表示映射为旋转矩阵,详细计算同样参考3D旋转变换。
降采样
论文基于体素栅格来降采样,每个体素尺寸为,每个体素中存储了原始点云。基于体素的降采样分为两步:
- 降采样得到。通过设定体素尺寸为 其中 ,并且每个体素只保留一个点;这部分的降采样点后续会用来更新局部地图,所以不能一开始降采样太狠,否则后续局部地图匹配不鲁棒;
- 继续降采样得到。为了保证ICP的计算效率,需要进一步降采样。通过设定体素尺寸为,且,每个体素保留一个点。采样自,所以。
实现代码如下:
KissICP::Vector3dVectorTuple KissICP::Voxelize(const std::vector<Eigen::Vector3d> &frame) const {
// 体素尺寸
const auto voxel_size = config_.voxel_size;
// 降采样1
const auto frame_downsample = kiss_icp::VoxelDownsample(frame, voxel_size * 0.5);
// 降采样2
const auto source = kiss_icp::VoxelDownsample(frame_downsample, voxel_size * 1.5);
return {source, frame_downsample};
}其中VoxelDownsample实现代码如下:
std::vector<Eigen::Vector3d> VoxelDownsample(const std::vector<Eigen::Vector3d> &frame, double voxel_size) {
tsl::robin_map<Voxel, Eigen::Vector3d, VoxelHash> grid;
grid.reserve(frame.size());
for (const auto &point : frame) {
const auto voxel = Voxel((point / voxel_size).cast<int>());
if (grid.contains(voxel)) continue;
grid.insert({voxel, point});
}
std::vector<Eigen::Vector3d> frame_dowsampled;
frame_dowsampled.reserve(grid.size());
for (const auto &[voxel, point] : grid) {
(void)voxel;
frame_dowsampled.emplace_back(point);
}
return frame_dowsampled;
}估计对应点
ICP算法第一步是找到Source点云与Target点云中的对应点,第二步是针对对应点 (Correspondence),构建优化算法配准求解位姿态。论文中激光里程计遵循frame-to-map流程,也就是Source点云是激光点云帧,Target点云是局部地图,相比frame-to-frame更加鲁棒。
局部地图用体素栅格表示,具体对应代码中的VoxelHashMap类。有以下特点:
- 每个体素最多保留个点。
- 更新时,将新的点云加入到体素中。如果体素已包含个点,则这个体素不会被更新。
- 同时,为了保证计算实时性,局部地图只维护距离当前位姿内的体素。
我们先看第一步,对于Source点云中的一个点,如何在Target点云中找到对应点?即如何估计对应点。方案是需要求解最近邻问题。论文中采用体素哈希表和快速最近邻搜索方案来求解这个问题。
体素哈希表
体素哈希表可以简单理解为把空间3D点分块后,对每个块根据其3D坐标值建立索引,这样就像图像处理一样,可以根据索引值快速access到对应的点云。
局部地图的核心数据结构定义为:
tsl::robin_map<Voxel, VoxelBlock, VoxelHash> map_;Voxel, VoxelBlock, VoxelHash对应的定义分别为:
using Voxel = Eigen::Vector3i;
struct VoxelBlock {
// buffer of points with a max limit of n_points
std::vector<Eigen::Vector3d> points;
int num_points_;
inline void AddPoint(const Eigen::Vector3d &point) {
if (points.size() < static_cast<size_t>(num_points_)) points.push_back(point);
}
};
struct VoxelHash {
size_t operator()(const Voxel &voxel) const {
const uint32_t *vec = reinterpret_cast<const uint32_t *>(voxel.data());
return ((1 << 20) - 1) & (vec[0] * 73856093 ^ vec[1] * 19349669 ^ vec[2] * 83492791);
}
};其中Voxel是map_对应的索引值,等于坐标值除以体素尺寸:
auto voxel = Voxel((point / voxel_size_).template cast<int>());VoxelBlock存储了Voxel内的原始点云。
VoxelHash定义了Hash方法:
其中是大素数,避免hash冲突,可参考论文Optimized Spatial Hashing。
快速最近邻搜索
对于Source点云中,可以根据建立的体素哈希表,查找该点在Target点云中的空间相邻体素,然后从体素中搜索与距离最近的点,作为最近邻。处理代码如下所示:
// Lambda Function to obtain the KNN of one point, maybe refactor
auto GetClosestNeighboor = [&](const Eigen::Vector3d &point) {
auto kx = static_cast<int>(point[0] / voxel_size_);
auto ky = static_cast<int>(point[1] / voxel_size_);
auto kz = static_cast<int>(point[2] / voxel_size_);
std::vector<Voxel> voxels;
// 从27个邻接Voxels中获取
voxels.reserve(27);
for (int i = kx - 1; i < kx + 1 + 1; ++i) {
for (int j = ky - 1; j < ky + 1 + 1; ++j) {
for (int k = kz - 1; k < kz + 1 + 1; ++k) {
voxels.emplace_back(i, j, k);
}
}
}
using Vector3dVector = std::vector<Eigen::Vector3d>;
Vector3dVector neighboors;
neighboors.reserve(27 * max_points_per_voxel_);
std::for_each(voxels.cbegin(), voxels.cend(), [&](const auto &voxel) {
auto search = map_.find(voxel);
if (search != map_.end()) {
const auto &points = search->second.points;
if (!points.empty()) {
for (const auto &point : points) {
neighboors.emplace_back(point);
}
}
}
});
// 在上一个循环里就可以把最近邻sort出来,不用再遍历一遍,是否更优?
Eigen::Vector3d closest_neighbor;
double closest_distance2 = std::numeric_limits<double>::max();
std::for_each(neighboors.cbegin(), neighboors.cend(), [&](const auto &neighbor) {
double distance = (neighbor - point).squaredNorm();
if (distance < closest_distance2) {
closest_neighbor = neighbor;
closest_distance2 = distance;
}
});
return closest_neighbor;
};动态最近邻阈值
在最近邻搜索过程中,可能存在异常点,虽然其距离是最近的,但不可用。因此,需要引入一个阈值,若对应点对的距离超过这个阈值,则对应点对是无效的。这个阈值的设计很讲究,设小了,可能因为错误匹配点ICP失败,设大了,处理时间大大增加。初始位姿大误差、动态环境、传感器噪声等都会影响到阈值的选择。这是各类ICP算法中最重要的一个调优参数。
通常做法是根据应用场景,调优出一个固定的阈值,比如1m。但这限制了算法的通用性。因此KISS-ICP提出动态最近邻阈值方法:根据恒速模型预测的结果与当前ICP估计出来的结果的差异,动态调整最近邻阈值。这个思路比较直接,因为差异比较大的话,说明雷达在做加减速运动,机动性较强,需要把阈值宽松一点。
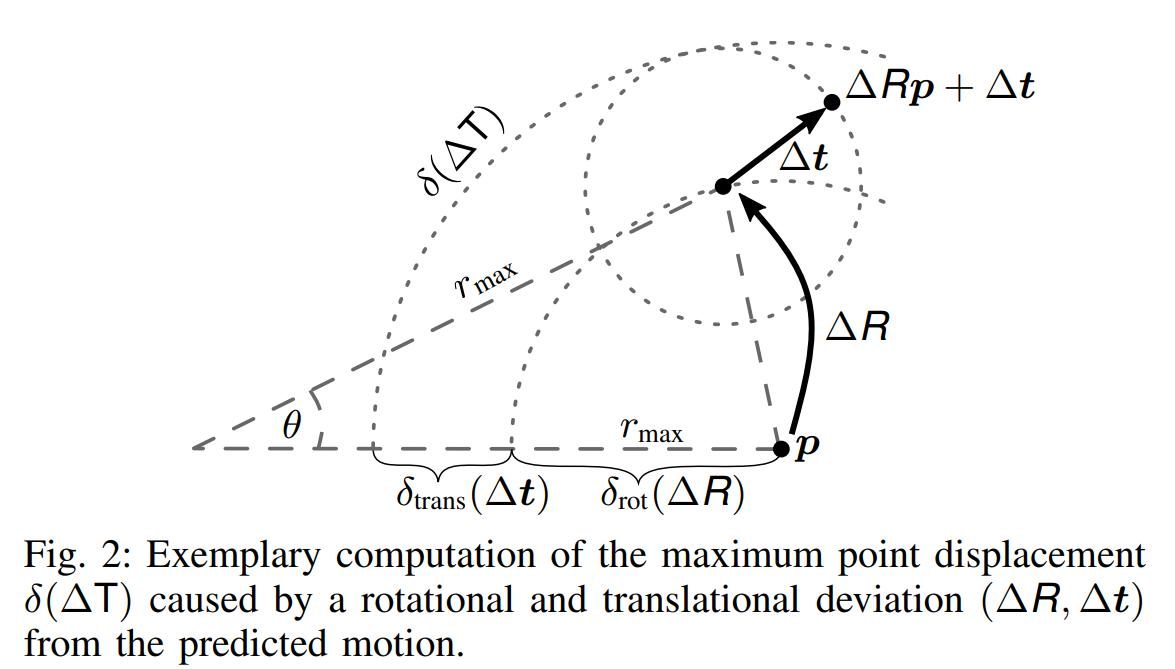
假设时刻预测的位姿为,ICP顺利解算得到的位姿为,则位姿差 。根据三角不等式,由位姿差带来的估计出的所有点云对的位置偏差上限为:
令,其中是以最远距离点及误差角度计算出的弦长,为平移误差:
如下图所示:
下一步是如何根据估计出当前时刻的阈值 ?论文将建模为零均值高斯噪声, ,那么定义为3-sigma限:。
标准差计算如下:
其中集合定义如下:
包含了到当前时刻的所有点,且排除了静止、恒速等情况下的差异小的情况,防止标准差被快速拉小。(是否需要包含所有点?对于突然剧烈运动工况,参数调整可能反应不过来。)
点云配准
点云配准采用传统的点到点ICP方法。没有采用特征法,比如法向量、曲率、特征点等方案,是为了算法的通用性,避免对不同雷达和环境进行单独适配。点到点ICP配准步骤如下:
- 点云预测。将当前时刻雷达坐标系点云通过预测的位姿,转换到全局坐标系,得到待配准点云:
-
ICP迭代配准。 a. 估计局部地图与待配准点云的点云对,根据估计对应点章节; b. 求解当前位姿更新量:
c. 更新待配准点云:
d. 重复以上步骤,直到收敛。收敛条件是,设置为。
-
更新得到最终的位姿:
其中.
-
更新局部地图,通过更新后的位姿将融合到局部地图。
对应的代码如下所示:
Sophus::SE3d RegisterFrame(const std::vector<Eigen::Vector3d> &frame,
const VoxelHashMap &voxel_map,
const Sophus::SE3d &initial_guess,
double max_correspondence_distance,
double kernel) {
if (voxel_map.Empty()) return initial_guess;
// 1. 点云预测
std::vector<Eigen::Vector3d> source = frame;
TransformPoints(initial_guess, source);
// 2. ICP迭代匹配
Sophus::SE3d T_icp = Sophus::SE3d();
for (int j = 0; j < MAX_NUM_ITERATIONS_; ++j) {
// 2.a 估计对应点
const auto &[src, tgt] = voxel_map.GetCorrespondences(source, max_correspondence_distance);
// 2.b 求解位姿更新量
const auto &[JTJ, JTr] = BuildLinearSystem(src, tgt, kernel);
const Eigen::Vector6d dx = JTJ.ldlt().solve(-JTr);
const Sophus::SE3d estimation = Sophus::SE3d::exp(dx);
// 2.c 更新点云
TransformPoints(estimation, source);
// Update iterations
T_icp = estimation * T_icp;
// 2.d 收敛条件
if (dx.norm() < ESTIMATION_THRESHOLD_) break;
}
// 3. 最终位姿
return T_icp * initial_guess;结语
具体的实验结果可以参考论文,也有众多SLAM网友们在代码开源后纷纷测试了自己的bag包,整体效果是很不错的,确实简单易用。但目前KISS-ICP还存在以下几个主要方面:
- 主要针对稠密点云激光雷达设计,对于32线或者Livox雷达,可能运行失败,需要调整降采样模块,避免过分降采样;
- 没有考虑动态环境,比如行人较多的商场、学校;
- 没有对雨雪雾天气下的点云做预处理,当然这个要求可能有点过分,毕竟这是激光雷达传感器要去解决的问题;
- 还是一个单纯的里程计系统,无法作为建图工具;
不过作为改进版本的ICP,拿来深入理解学习ICP原理,跑一跑测试数据包,还是挺不错。